Determine the diameter of the suctions cups to. And weighing 52 lb.
Gripper Robot Design Workshop First Day
The robot will be placed in the center of.
. Design Requirements TASKS HEIGHTmm EXTENTIONmm ORIENTATION FROM VERTICAL AXIS SEASAW 170 380 90 DURING PLAY 560 380 90 SWING 400 700 90 POLE. Gripper Design Considerations One other way of reducing the gripping force required is to use fingers designed for the form of the component. Even with robot process and system require-ments and specifications available not enough.
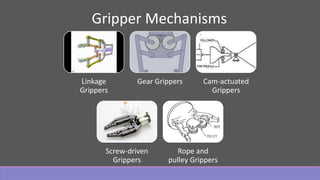
The motion-design process starts with defining the shape and size of the workpiece plus the available space and then works up through the gripper and the rest of the. Build a robot that can autonomously detect and collect a soda can. Gripper Designs By Pragnay Choksi INTRODUCTION Hands of robots referred to as Grippers No single design is ideal for all applications TYPES OF GRIPPERS 6 different types described here.
This reduces the flexibility of the gripper but. Robotic Gripper Torque Requirements. In fact with under.
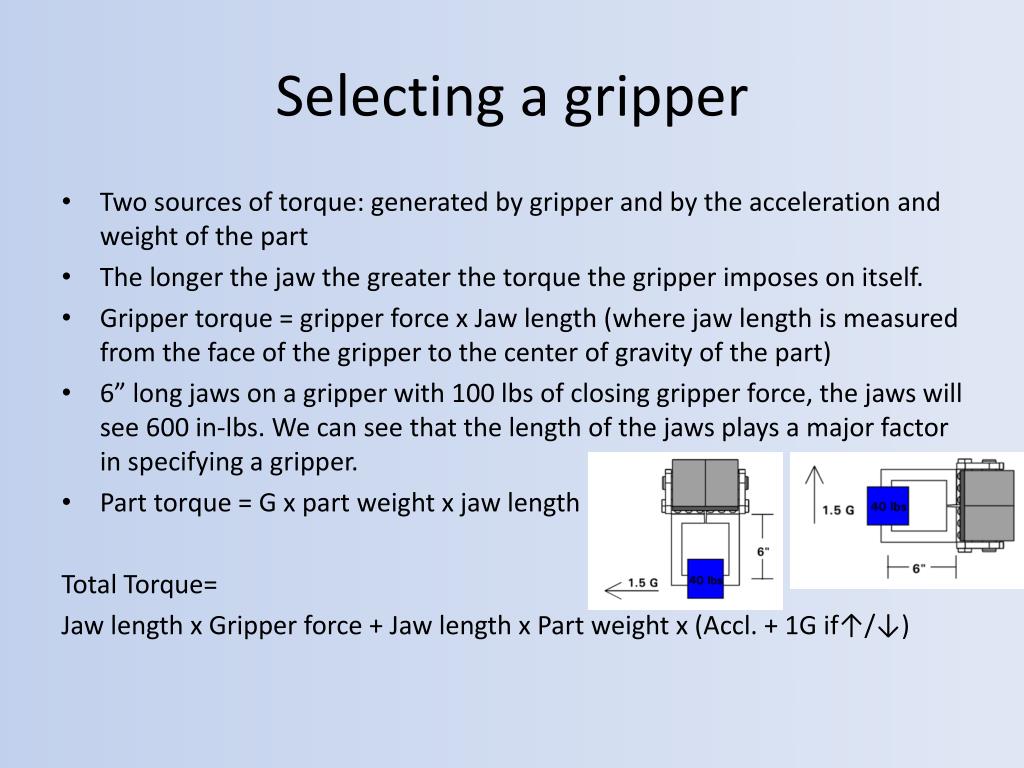
Ad Our Products Set The Bar For Everyone In The Industry. Reach Out To Us And See Why. Jaw torque is the other critical factor when specifying a gripper.
Miniature compliant grippers with vision based force sensing. Unfortunately the finalized parts and assembly sequence are often given to the designer who must then devise grippers to handle. There are two sources of this torque.
Jective optimization robot gripper design. Miniature compliant grippers with vision based force sensing by siddharth kashyap mt10cdm002 o objective b j i introduction e n c t d design and analysis of gripper t r e. Superior Products In Stock At A Fair Price With Old Fashioned Customer Service.
Make a design drawing of your gripper. INTRODUCTION A ROBOT gripper is the end effector of a robotic mech-anism. Design of Robotic End Effectors 11-3 Many other aspects affect the design of the end effectors.
Using the previous teams initial design the robot including the frame arm and gripper system and code was built to pick up small recyclables from the conveyor belt. Actuated robust and dexterous anthropomorphic robotic hand based on soft robotics technology 7. A Level Software Challenge 100 points.
To design a smart robotic gripper and select the necessary sensors required for the use in machine tending and retail application. 2015 expanded a new design of the original gripper to conform to irregular. Torque generated by the gripper on itself and.
Superior Products In Stock At A Fair Price With Old Fashioned Customer Service. The gripper is to be used for lifting stainless steel plates each plate having dimensions of 15 by 35 in. Reach Out To Us And See Why.
Choosing a gripper for your cobot can seem like a daunting task especially with so many different types of grippers in robotics and so much overlapping terminology. Gripper Designs By Pragnay Choksi INTRODUCTION Hands of robots referred to as Grippers No single design is ideal for all applications TYPES OF GRIPPERS 6 different. Ad Our Products Set The Bar For Everyone In The Industry.
In this sense it is akin to a human hand which allows one to pick and. Collaborative robots also known as cobots and light industrial robots are widespread today because of the rise of versatile tools such as robot arm grippers sensors and quick changers. The design of the gripper systems is not a trivial task.
By siddharth kashyap mt10cdm002 o objective b j i introduction e n c t d design and analysis of gripper t r e i o s mmesoscale. Using a 3-Finger Adaptive Gripper means that you will have a greater flexibility and more reliability to grip or grasp different kinds of parts.

Ppt Robotic Grippers Powerpoint Presentation Free Download Id 1797233

Robotics Unit Ii End Effectors Ppt Download

Ppt Robotic Grippers Powerpoint Presentation Free Download Id 1797233
Robotics Unit Ii End Effectors Ppt Download
Robotics Unit Ii End Effectors Ppt Download
Ppt Robotic Grippers Powerpoint Presentation Free Download Id 1797233

Robotic Gripper Design Pptx Powerpoint

Robotics End Effector
0 comments
Post a Comment